Towards Real-Time Mapping and Forest Inventory Generation using Handheld LiDAR
Aug 19, 2022
Researchers from the Dynamic Robot Systems (DRS) group at the University of Oxford are developing a handheld LiDAR system that is capable of mapping forests and generate a forest inventory in real-time.

The handheld device seen in the picture processes the LiDAR scans in an online fashion, and creates 3D point cloud reconstructions of large forest areas. It provides feedback to the operator via a screen mounted on the device to ensure the desired area is mapped satisfactorily without any gaps or missing sections.
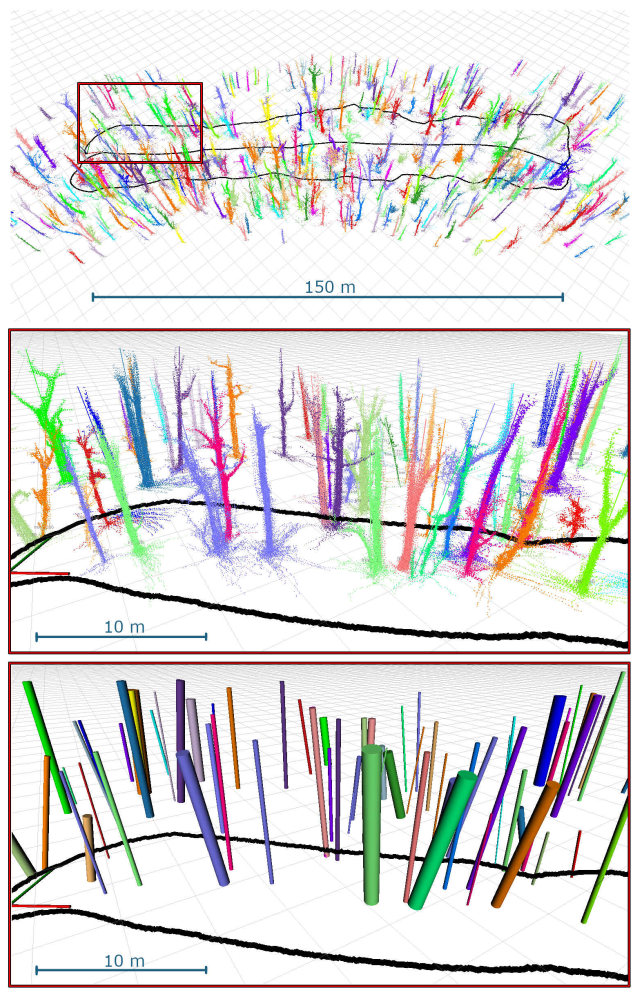
In addition to creating 3D point cloud reconstructions, the system is able to segment and track individual trees, and create an inventory for the detected trees. Segments relating to each tree are accumulated over time, and tree models are completed as more scans are captured from different perspectives. Here a portion of the forest at Wytham woods near Oxford is visualized. Each tree in the transact is identified and visualized in an unique color and individual tree properties such the the Diameter at Breast Height (DBH) are calculated.
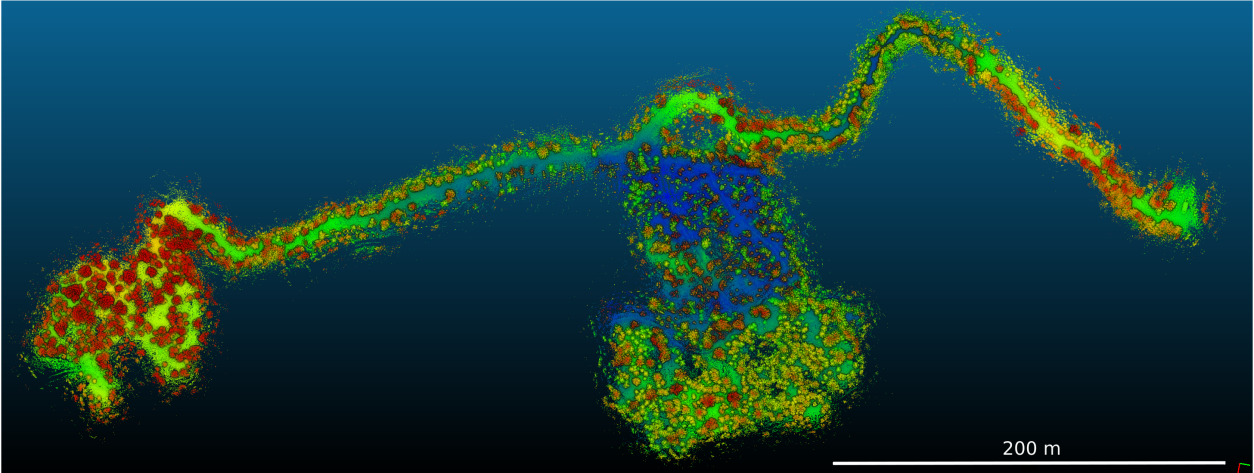
In collaboration with PreFor, the system was tested on a large-scale dataset spanning several kilometers from a commercial pine tree forest in Finland. The dataset was collected over multiple sessions which was then fused in a post-processing step. The 3D point cloud reconstruction of the forest is shown below.
More details about the system are explained in this video: