Project
Vision
It’s a cool spring morning in Joensuu, Finland. Niina Honkala is a forest planner and is drinking her morning coffee in her home office. She logs on to her forestry company’s Decision Support System (DSS) to finalise a forest management plan for a 60 hectare property. The day before, a robot team mapped the property. The ANYmal quadruped trotted around the stand, and together with aerial robots, they updated the server with a detailed model of individual trees, the terrain, some boulders, and a few flooded depressions.
Overnight the DSS compared the collected data to a previous mission from three years ago. It automatically detected tree growth and individual tree vitality. Niina then adjusts the au- tomated management plan to maximize biodiversity values — tuning the intended logging intensity, and setting a perimeter around the wet areas. The DSS automatically updates the logging plans and sends them forward to Sami Torvalds in the field.
Today Sami is overseeing a fleet of three lightweight, autonomous harvesters. He deploys the first 4 tonne harvester. Its light weight causes little soil compaction and it can move through the stand without damaging other trees. Previously, full-sized 16 tonne harvesters could not be used in this manner. By the end of the day, the first stand has been logged. The DSS is updated and timber is ready for collection at the road side storage site. With the data updated, Niina logs off for the evening. The forest stand is quiet and peaceful.
Ambitions
The mission of Digiforest is to develop the technology needed to achieve sustainable digital forestry. The following outlines four scientific ambitions which form the basis of our project. They include fundamental development for (1) mobile robotic navigation (multi-sensor motion estimation, 3D mission planning) and (2) data-driven semantic mapping. (3) This highly detailed data will be presented to a human supervisor, enabling him/her to make informed decisions and (4) to plan the deployment of a mobile robot harvester to selectively intervene in an environmental manner.
Ambition 1: Mobile Robot Autonomy for Forestry

Mobile robots will act as the core enabler for the proposed next-generation forestry: they will be tasked with data collection for map building (Ambition 2), and in turn decision support (Ambition 3), as well as navigating the harvester to cut individual trees (Ambition 4). Safely deploying a heterogeneous team of robots in an unstructured forest still poses a major challenge.
Objective:
A heterogeneous team of flying and walking robots that can collect and report valuable forest data autonomously, while being aware of different types of obstacles (e.g., tree branches), and terrain hazards for self-preservation. Novel navigation technologies allow for seamless autonomy in dense forests, while cross-platform navigation support, as well as deployment of aerial vehicles from legged robots compensates for the individual limitations of every platform.
Ambition 2: Turning Forest Scans into Actionable Data

Decision-making requires models of the forest environment and/or processed data for extracting relevant information. Thus, this project puts substantial efforts into combining the data acquired by the different vehicles into actionable information. Sensor data stems from UAVs and UGVs, operating above and below canopy, as well as under varying conditions. In addition to that, we focus on an automatic, semantic interpretation of the data. Using modern machine learning approaches, we will develop a forest-tailored scene segmentation system. Furthermore, we will develop a novel geometric-semantic representation of trees allowing for high-resolution geometric modeling and inspection that integrates semantics. These detailed models of individual objects such as trees in the forest and the segmentation are the basis for downstream decision-making. The semantic segmentation will furthermore support the ground vehicles’ navigation system.
Objective:
Turning sensor data from UAVs and UGVs into geometric and semantic information that supports actions and decision making. The heterogeneous information needs to be interpreted, aligned, merged and made accessible.
Ambition 3: Enriching Decision Support Systems with Actionable Data
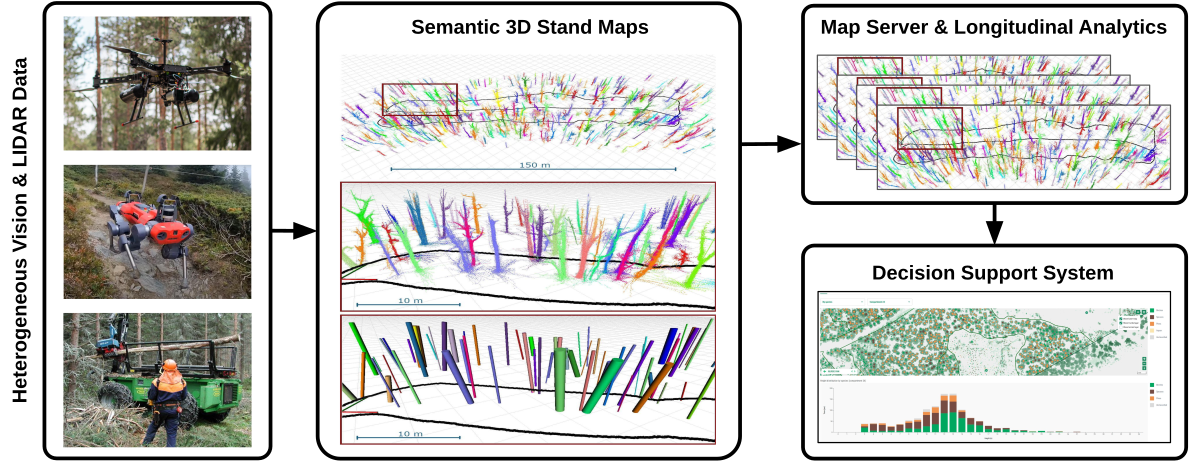
The Decision Support System (DSS) aims to provide forest managers with information about the development of biodiversity and ecosystem services under changing management and climate conditions, thereby highlighting particular synergies and trade-offs. DSS are typically based on three main components: a database, a forest growth model, and a multi-criteria decision support analysis system. The interface for integrating the improved mapping system is the database, where all spatial data is stored and subsequently processed. Thus, the availability of high quality data is the key for the efficiency and accuracy of any model and in contrast to many others, we here have the unique opportunity to attain them. They will be integrated into the DSS, which is connected to an enhanced forest growth simulator and includes improved indicator value functions.
Objective:
Creating a multi-scale forestry DSS, which fosters environmental-friendly and socio-economic forest management by supporting individual tree level optimization of forest management practices.
Ambition 4: Achieving Sustainable and Autonomous Selective cutting
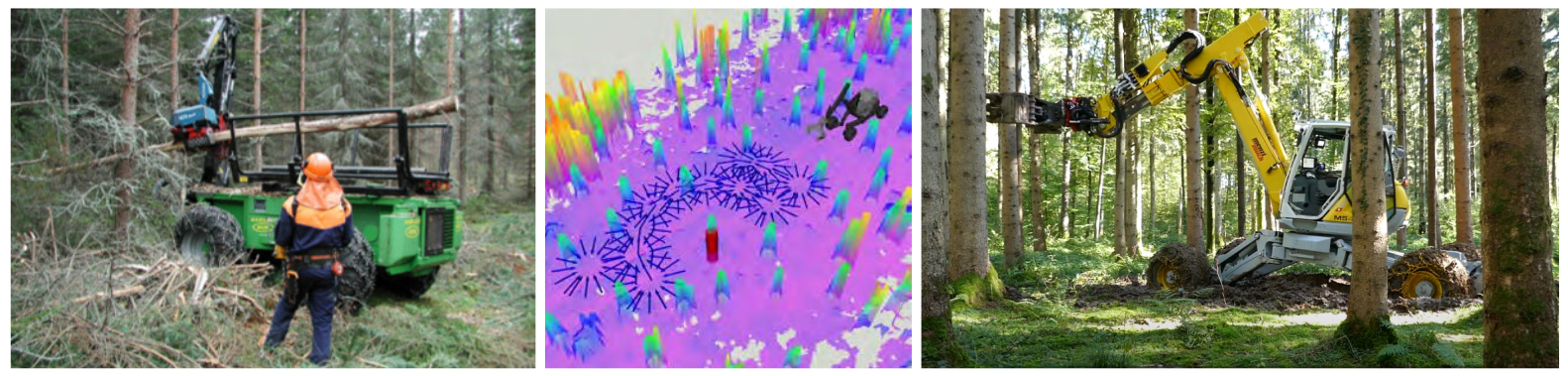
Full-sized harvesting vehicles cause damage to the soil, roots of nearby trees and drainage. In addition, they are difficult to apply in complex terrains (e.g. steepness, limited soil bearing capacity, dense stands, narrow conditions). This motivates the development of smaller cab-less vehicles for remote controlled harvesting operations. Current state of the art machines expose humans to the elements; with a lot operations being carried out in the winter. For this and other socio-economic factors it is difficult to cost-effectively carry out thinning or selective cutting operations in Northern and Central-Europe. Our goal is to develop a lightweight harvester which executes missions with high-level supervised autonomy. Our ambition is to develop a completely novel approach to selective cutting which directly connects to our mapping data server.
Objective:
Development and automation of a lightweight harvester to enable remote and autonomous forest operations. The robotic harvester will be able to autonomously navigate within a forest stand, perform precise cutting of selected trees, and return to base while remaining cognizant of its path traversability and minimizing vehicle impact on the environment.
Work Packages
WP1: Project Management
WP2: Hardware and Automation
WP3: Field Autonomy
WP4: Forest Digital Twin
WP5: Forest Decision Support
WP6: Integration and Field Testing
WP7: Dissemination and Exploitation